

關(guān)于大地坐標(biāo)系四參數(shù)和七參數(shù)的幾點認(rèn)識
我們在日常的測繪當(dāng)中經(jīng)常要用到相關(guān)的參數(shù),四參數(shù)和七參數(shù)更是經(jīng)常提到。以下僅提供本人對大地坐標(biāo)系四參數(shù)和七參數(shù)的幾點認(rèn)識:
系")
參數(shù)的概念
1、兩個不同的二維平面直角坐標(biāo)系之間轉(zhuǎn)換時,通常使用四參數(shù)模型(數(shù)學(xué)方程組)。在該模型中有四個未知參數(shù),即:
(1)兩個坐標(biāo)平移量(△X,△Y),即兩個平面坐標(biāo)系的坐標(biāo)原點之間的坐標(biāo)差值;
(2)平面坐標(biāo)軸的旋轉(zhuǎn)角度A,通過旋轉(zhuǎn)一個角度,可以使兩個坐標(biāo)系的X和Y軸重合在一起。
(3)尺度因子K,即兩個坐標(biāo)系內(nèi)的同一段直線的長度比值,實現(xiàn)尺度的比例轉(zhuǎn)換。通常K值幾乎等于1.
通常至少需要兩個公共已知點,在兩個不同平面直角坐標(biāo)系中的四對XY坐標(biāo)值,才能推算出這四個未知參數(shù),計算出了這四個參數(shù),就可以通過四參數(shù)方程組,將一個平面直角坐標(biāo)系下一個點的XY坐標(biāo)值轉(zhuǎn)換為另一個平面直角坐標(biāo)系下的XY坐標(biāo)值。
2、兩個不同的三維空間直角坐標(biāo)系之間轉(zhuǎn)換時,通常使用七參數(shù)模型(數(shù)學(xué)方程組),在該模型中有七個未知參數(shù),即:
(1)三個坐標(biāo)平移量(△X,△Y,△Z),即兩個空間坐標(biāo)系的坐標(biāo)原點之間坐標(biāo)差值;
(2)三個坐標(biāo)軸的旋轉(zhuǎn)角度(△α,△β,△γ)),通過按順序旋轉(zhuǎn)三個坐標(biāo)軸指定角度,可以使兩個空間直角坐標(biāo)系的XYZ軸重合在一起。
(3)尺度因子K,即兩個空間坐標(biāo)系內(nèi)的同一段直線的長度比值,實現(xiàn)尺度的比例轉(zhuǎn)換。通常K值幾乎等于1.
通常至少需要三個公共已知點,在兩個不同空間直角坐標(biāo)系中的六對XYZ坐標(biāo)值,才能推算出這七個未知參數(shù),計算出了這七個參數(shù),就可以通過七參數(shù)方程組,將一個空間直角坐標(biāo)系下一個點的XYZ坐標(biāo)值轉(zhuǎn)換為另一個空間直角坐標(biāo)系下的XYZ坐標(biāo)值。
參數(shù)的使用環(huán)境
1、如果地面兩點的距離小于10KM,我們幾乎可以忽略因采用不同橢球參數(shù)對轉(zhuǎn)換精度的影響,所以,采用四參數(shù)來完成兩種坐標(biāo)系的轉(zhuǎn)換。
2、如果地面上兩點的距離超過了15km,那么我們就必須考慮兩種不同坐標(biāo)系所采用的橢球參數(shù),避免因橢球參數(shù)的差異,導(dǎo)致點位換算后的精度過低,所以就必須采用七參數(shù)來完成兩種坐標(biāo)系的轉(zhuǎn)換。
說得簡單一點,七參數(shù)是一種空間直角坐標(biāo)系的轉(zhuǎn)換模型,而四參數(shù)是一種平面直角坐標(biāo)系的轉(zhuǎn)換模型。
目前我們外業(yè)測量采用RTK儀器比較居多,在當(dāng)前的GPS軟件中,也有相應(yīng)的四參數(shù)和七參數(shù)設(shè)置。采用四參數(shù),對于簡單的地形測量其實沒有必要進行高程擬合,即使你用了高程擬合參數(shù)也很難達到四等水準(zhǔn)測量的精度,即使采用高程擬合參數(shù)后,RTK的高程測量的精度也不能進行保證的。我們知道:RTK是通過測量直接獲得的大地高減去高程異常值,來求解正常高的,而采用數(shù)學(xué)擬合法獲得的高程異常值不一定精確,加之不同地方的高程異常值有差異。所以,小范圍測區(qū)沒有必要使用高程擬合參數(shù),而大面積的測區(qū)使用一下盡量讓求解值接近正常高吧。
參數(shù)的求解
1、不同的地方因為投影發(fā)現(xiàn)變化,所以參數(shù)也會有不同,可以向當(dāng)?shù)販y繪主管部門獲取相應(yīng)區(qū)域的參數(shù);
2、能夠進行參數(shù)求解的軟件:CASS9.1、MAPGIS6.7、GPS內(nèi)置軟件等。
更多相關(guān)

千尋CORS如何做到“每秒服務(wù)百萬用戶”
千尋CORS特別“穩(wěn)”,用過的人都知道。撐起千尋服務(wù)穩(wěn)定性的,是一項名為“高并發(fā)”的技術(shù)能力。 什么是“高并發(fā)”?“高并發(fā)”是指大量用戶(終端)的快速接入。對于網(wǎng)絡(luò)平臺而言,如果不具備良好的高并發(fā)處...

千尋知寸CORS賬號:開啟厘米級定位新紀(jì)元
千尋知寸CORS賬號:開啟厘米級定位新紀(jì)元在數(shù)字化浪潮席卷全球的今天,高精度定位技術(shù)已成為推動社會進步的重要引擎。千尋知寸CORS賬號作為這一領(lǐng)域的創(chuàng)新成果,正在重新定義位置服務(wù)的精度標(biāo)準(zhǔn),為各行各業(yè)...
CAD視口中的坐標(biāo)系不見了!怎么辦?
當(dāng)我們在打卡CAD時,左下角總會有一個坐標(biāo)系,但是,如果我們的坐標(biāo)不見了要怎么辦呢?今天,就來教大家,如何調(diào)出坐標(biāo)系。CAD中的視口是一個二維的窗口,用于顯示三維模型或布局中的部分內(nèi)容。視口本身并沒有...

快速響應(yīng)開展昌都市江達縣山體滑坡應(yīng)急測繪保障工作
10月11日7:00,金沙江流經(jīng)的川藏交界處西藏昌都市江達縣波羅鄉(xiāng)寧巴村發(fā)生山體滑坡,造成斷流,形成堰塞湖,危及人民群眾生命財產(chǎn)安全。按照自然資源部關(guān)于盡快獲取地質(zhì)災(zāi)害區(qū)域影像的部署要求,四川測繪...

科普:這個定位的儀器到底是叫GPS還是叫RTK?那GNSS又是啥?
這個用來定位的儀器,有人叫它GPS 也有人叫它RTK 還有人說這是GNSS,不是GPS也不是RTK 針對以上幾個關(guān)鍵詞,我們探討一下什么稱呼才是正確合理的 1、首先來我們看看什么叫GPS ...
激光掃描三維建模和傾斜攝影實景建模的區(qū)別
激光掃描三維建模和傾斜攝影實景建模的區(qū)別目前最為普遍且受歡迎的實景建模方式是激光掃描三維建模和傾斜攝影建模。接下來,我們一起來了解下這兩種方式有什么區(qū)別和優(yōu)勢,適用于哪些地方。 一、數(shù)據(jù)獲取...
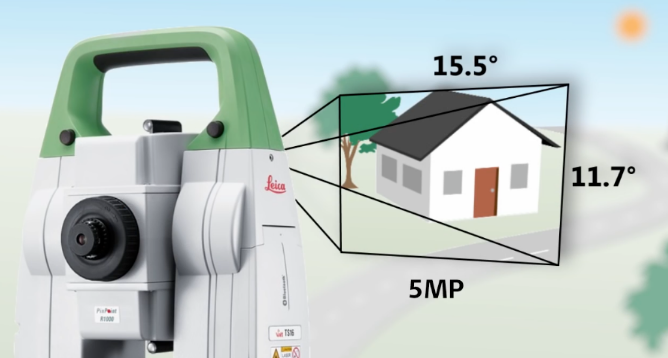
徠卡-如何讓全站儀1秒鐘采集500萬個數(shù)據(jù)?
1977年6月,WILD公司在國際測量師協(xié)會(FIG)會議上,首次對發(fā)布全站式電子速測儀TC1,從此外業(yè)“打點”,內(nèi)業(yè)“連圖”的模式開始在大比例尺測繪中普及。 直到當(dāng)今,全站儀作為百米量級上最高...

選擇正確的棱鏡和選擇正確的儀器同樣重要
人們通常認(rèn)為,棱鏡在測量過程中承擔(dān)的工作較為簡單——只要“待”在那里就好。但請記住“木桶效應(yīng)”,測量工作的質(zhì)量將取決于較薄弱的環(huán)節(jié),“小”棱鏡也可...
 環(huán)球測繪微信
環(huán)球測繪微信